Spiking Neural Network driving a car in 2D environment
This time I would like to present one of my projects that I did as an assignment for “New trends in neural calculations” and “Soft Computing”. The objective of the assignment was to create an application that solves some problem using advanced type of neural network trained by a differential evolution algorithm. As the topic says, I chose to create a simulation of a car in 2D environment with top-down view which was driven by a driver based on a simplified spiking neural network and trained by a differential evolution algorithm. The chosen problem was based on a paper Evolutionary Spiking Neural Networks as Racing Car Controllers by Elias E. Yee and Jason Teo1 in which they did the same thing but in 3D environment and with more sensors.
 The application is based on the SDL2 and Box2D3 as a base components. SDL is used to handle key events and to initialize the context of an OpenGL with a window. Box2D is used to create physics environment in which the car will move. To simulate the car I used a ready-made solution that implements top-down car4 which matched my needs perfectly. Other elements like implementation of spiking neural network, differential evolution, plots, sensors and the race track I wrote by myself. I plan to describe them in details in further posts.
The application is based on the SDL2 and Box2D3 as a base components. SDL is used to handle key events and to initialize the context of an OpenGL with a window. Box2D is used to create physics environment in which the car will move. To simulate the car I used a ready-made solution that implements top-down car4 which matched my needs perfectly. Other elements like implementation of spiking neural network, differential evolution, plots, sensors and the race track I wrote by myself. I plan to describe them in details in further posts.
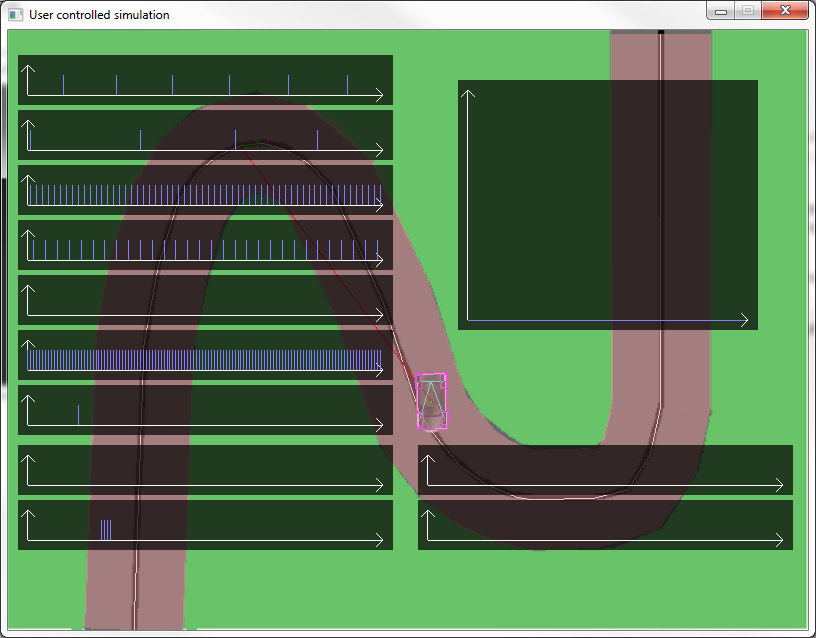
The final application is presented in the attached picture. It is controlled from main window but all informations (about current mode, keys, time) are displayed in console window. Application runtime is divided into two modes. The first is used to test the simulation with arrows and the second is used to control the neural network driver training and the third to see the results of that training.
The results of the project are quite surprising. Although the implementation of spiking neural network was as simple as possible, it managed to complete the S-track presented on the screen in reasonable time (~8s), after 3468 generations of differential evolution.
The source code is available at github and binaries are here.
- Yee E. and Teo J. 2011. Evolutionary Spiking Neural Networks as Racing Car Controllers. 11th International Conference on Hybrid Intelligent Systems (HIS 2011), pages 411-416, Melaka, Malaysia, December 2011. [↩]
- http://www.libsdl.org/ [↩]
- http://box2d.org/ [↩]
- http://www.iforce2d.net/b2dtut/top-down-car [↩]